Chapter 1: Introduction¶
I’ve wanted to write an general purpose operating system for a long time - it’s one of my computing bucketlist items. kOS, pronounced “chaos”, is my project to do that. Along the way, I’m going to write up my work [1] to help me understand what’s going on.
kOS will be a 64-bit operating system.
The first target¶
The first target is the Raspberry Pi 4B; mine has 8GB of memory available. It has a Broadcom BCM2711 System on Chip (SoC), which features a Cortex A72 quad-core ARMv8 processor running at 1.5 GHz. The L1 cache is 32kB for data, 48kB for instructions, and the L2 cache is 1MB. It also has a Videocore VI GPU, which has built-in support for OpenGL ES 3.1 and Vulkan 1.2.
As for I/O, it has a PCIe bus, a DSI [2] and CSI [3] bus [4], support for up to six I2C buses, up to six UARTs [5], and up to five SPI buses [6]. There are also a pair of HDMI outputs.
The BCM2711 has 58 general purpose I/O lines; 27 of these are exposed via the 40-pin header on the Raspberry Pi.
Some of the relevant pinouts:
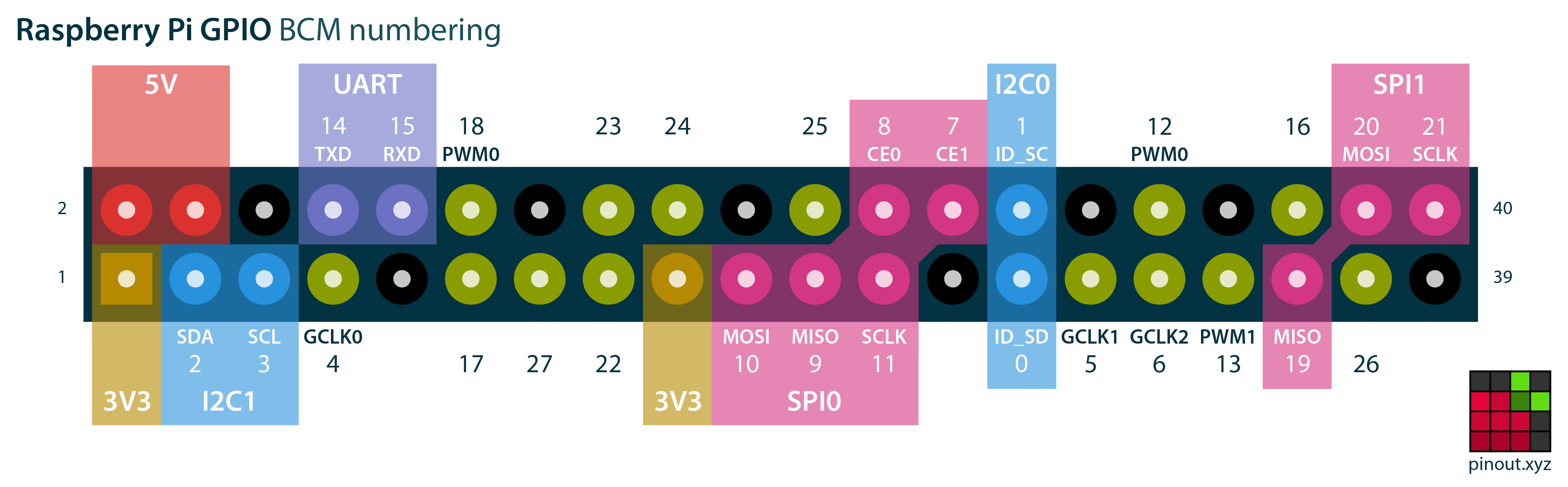
40-pin header pinout diagram, courtesy of pinout.xyz.¶
Booting the target¶
The Raspberry Pi documentation describes the boot sequence; there is an SPI flash EEPROM that has the initial bootloader.
The SoC powers up.
If the nRPIBOOT GPIO is high, or if the OTP hasn’t configured an nRPIBOOT pin [7], try to load
recovery.bin[8] and update the SPI EEPROM.Try to load the second-stage bootloader from the SPI EEPROM.
Initialize SDRAM and clocks.
Read the EEPROM configuration files ().
Check to see if a HALT is requested.
Read the next boot mode from the
BOOT_ORDERparameter in the EEPROM configuration. The boot modes are:RESTART: jump back to the first boot mode in the parameter.STOP: display the start.elf error pattern (see the appendices for a description of these) and loop indefinitely.SD_CARD: try to load from the SD card.NETWORK: use DHCP to get an IP address, then use either DHCP or TFTP to get a boot image.USB-MSD: check for USB mass storage, and try to load firmware from eachLUNdiscovered.NVME: the same, but using NVMe.RPIBOOT: trying to load firmware from a USB device connected to the USB-OTG port.
The first partition on the SD card must be a FAT partition, from which the bootloader looks for certain files:
Prior to the Pi 4,
bootcode.binis loaded first, which then loads astart.elfvariant. The Pi 4 uses its SPI EEPROM instead.The
start.elfvariants are firmware. Thestart4versions are used for the Raspberry Pi. -start.elf: basic firmware. -start_x.elf: has additional codecs. -start_db.elf: used for debugging. -start_cd.elf: cut-down firmware, removing hardware blocks.The
start.elffirmware is paired with an appropriately-named linker file,fixup.dat.config.txt: RPi configuration.overlays/: device-tree overlays
The minimum we’ll need to bring up the kernel are
bcm2711-rpi-4-b.dtbconfig.txtfixup4.datstart4.elf
Finally, our kernel8.img will go in the partition.